基于單片機(jī)的直流電動(dòng)機(jī)控制系統(tǒng)設(shè)計(jì)與研發(fā)
隨著自動(dòng)化技術(shù)的快速發(fā)展,基于單片機(jī)的直流電動(dòng)機(jī)控制系統(tǒng)已成為機(jī)電一體化領(lǐng)域的重要研究方向。該系統(tǒng)結(jié)合了微處理器的高效控制能力與直流電機(jī)優(yōu)異的調(diào)速性能,在工業(yè)自動(dòng)化、智能家居、機(jī)器人技術(shù)等領(lǐng)域具有廣泛的應(yīng)用前景。本文旨在探討一個(gè)完整的直流電動(dòng)機(jī)控制系統(tǒng)的設(shè)計(jì)、實(shí)現(xiàn)與研發(fā)過程,為畢業(yè)設(shè)計(jì)提供參考。
一、系統(tǒng)總體設(shè)計(jì)
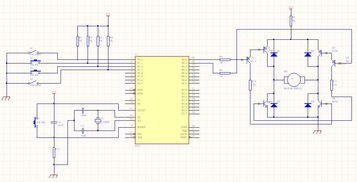
系統(tǒng)以單片機(jī)為核心控制器,負(fù)責(zé)接收指令、處理信號(hào)并輸出控制信號(hào)。外圍電路主要包括直流電動(dòng)機(jī)、驅(qū)動(dòng)模塊、速度檢測(cè)模塊、人機(jī)交互模塊以及電源模塊。系統(tǒng)通過閉環(huán)控制策略,實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)速的精確、穩(wěn)定調(diào)節(jié)。
二、核心硬件設(shè)計(jì)與選型
- 單片機(jī)選型:選用常見的STC89C52或更高級(jí)的STM32系列單片機(jī),它們具有豐富的I/O口、定時(shí)器和PWM輸出功能,能滿足控制需求。
- 電機(jī)驅(qū)動(dòng)模塊:采用H橋驅(qū)動(dòng)電路(如L298N、TB6612FNG芯片),實(shí)現(xiàn)對(duì)電機(jī)的正轉(zhuǎn)、反轉(zhuǎn)、制動(dòng)以及PWM調(diào)速控制。
- 速度檢測(cè)模塊:通常采用光電編碼器或霍爾傳感器,將電機(jī)轉(zhuǎn)速轉(zhuǎn)換為脈沖信號(hào)反饋給單片機(jī)。
- 人機(jī)交互模塊:包括按鍵、旋鈕用于輸入目標(biāo)轉(zhuǎn)速,LCD或OLED顯示屏用于實(shí)時(shí)顯示當(dāng)前轉(zhuǎn)速、狀態(tài)等信息。
- 電源模塊:為控制系統(tǒng)提供穩(wěn)定、隔離的電壓,確保各部件正常工作。
三、控制系統(tǒng)軟件設(shè)計(jì)
軟件程序是系統(tǒng)的“大腦”,主要實(shí)現(xiàn)以下功能:
- 初始化:配置單片機(jī)I/O口、定時(shí)器、中斷等。
- 速度采樣與計(jì)算:通過定時(shí)器捕獲速度傳感器的脈沖信號(hào),計(jì)算實(shí)際轉(zhuǎn)速。
- 控制算法:采用經(jīng)典的PID(比例-積分-微分)控制算法。將目標(biāo)轉(zhuǎn)速與實(shí)際轉(zhuǎn)速的偏差作為輸入,通過算法運(yùn)算,輸出相應(yīng)的PWM占空比,調(diào)節(jié)電機(jī)電壓,從而精確控制轉(zhuǎn)速。PID參數(shù)需通過調(diào)試整定,以達(dá)到快速響應(yīng)、超調(diào)小、穩(wěn)態(tài)誤差小的效果。
- PWM生成:利用單片機(jī)的PWM模塊或定時(shí)器模擬生成PWM波,控制驅(qū)動(dòng)芯片。
- 人機(jī)交互程序:處理按鍵輸入,刷新顯示內(nèi)容。
四、系統(tǒng)研發(fā)與調(diào)試要點(diǎn)
- 模塊化開發(fā):將硬件電路和軟件程序劃分為獨(dú)立模塊(如驅(qū)動(dòng)模塊、測(cè)速模塊、PID模塊等),分步設(shè)計(jì)、測(cè)試與聯(lián)調(diào),便于排查問題。
- 硬件調(diào)試:確保電源穩(wěn)定,焊接無(wú)誤;先測(cè)試驅(qū)動(dòng)電路能否正常控制電機(jī)啟停和轉(zhuǎn)向;再測(cè)試測(cè)速電路能否準(zhǔn)確輸出脈沖。
- 軟件調(diào)試:先編寫基礎(chǔ)驅(qū)動(dòng)程序,實(shí)現(xiàn)開環(huán)控制(即手動(dòng)設(shè)定PWM值看電機(jī)響應(yīng));再加入測(cè)速功能,驗(yàn)證轉(zhuǎn)速測(cè)量準(zhǔn)確性;最后集成PID閉環(huán)算法,從簡(jiǎn)單的P控制開始,逐步加入I、D環(huán)節(jié),觀察系統(tǒng)響應(yīng)曲線,調(diào)整參數(shù)至最優(yōu)。
- 抗干擾設(shè)計(jì):電機(jī)運(yùn)行時(shí)會(huì)產(chǎn)生電磁干擾,在電源端加入濾波電容,信號(hào)線采用屏蔽或雙絞線,軟件上可加入數(shù)字濾波算法(如中值濾波、均值濾波)處理采樣數(shù)據(jù)。
五、創(chuàng)新與拓展方向
在完成基本調(diào)速功能的基礎(chǔ)上,可以考慮以下拓展以提升設(shè)計(jì)深度:
- 增加通訊接口(如藍(lán)牙、Wi-Fi),實(shí)現(xiàn)手機(jī)APP或電腦遠(yuǎn)程控制與監(jiān)控。
- 實(shí)現(xiàn)多電機(jī)同步控制或位置伺服控制。
- 加入故障診斷與保護(hù)功能(如過流、過熱保護(hù))。
- 采用更先進(jìn)的控制算法,如模糊PID、神經(jīng)網(wǎng)絡(luò)控制等,以適應(yīng)更復(fù)雜的控制需求。
,一個(gè)成功的基于單片機(jī)的直流電動(dòng)機(jī)控制系統(tǒng)設(shè)計(jì),需要綜合運(yùn)用模擬電路、數(shù)字電路、單片機(jī)原理、自動(dòng)控制理論等多學(xué)科知識(shí)。通過系統(tǒng)的方案設(shè)計(jì)、細(xì)致的硬件制作、嚴(yán)謹(jǐn)?shù)能浖幊桃约胺磸?fù)的調(diào)試優(yōu)化,最終能夠?qū)崿F(xiàn)一個(gè)穩(wěn)定可靠、性能優(yōu)良的控制系統(tǒng)。這不僅能夠圓滿完成畢業(yè)設(shè)計(jì),更是對(duì)工程實(shí)踐能力的一次寶貴鍛煉,為未來從事電機(jī)及其控制系統(tǒng)研發(fā)工作奠定堅(jiān)實(shí)基礎(chǔ)。
如若轉(zhuǎn)載,請(qǐng)注明出處:http://www.ytrongmao.com/product/40.html
更新時(shí)間:2026-02-16 15:22:36